
Python人工智能算法学习 禁忌搜索算法求解旅行商问题(TSP)的研究与实现
本文针对旅行商问题(TSP),设计并实现了一种基于禁忌搜索(Tabu Search, TS)的智能优化算法。通过构建包含50个城市的TSP实例,采用禁忌表、邻域搜索和特赦准则等核心机制,有效求解大规模组合优化问题。实验结果表明,该算法在合理时间内能够找到高质量的近似最优解,并通过收敛曲线验证了算法的有效性。
禁忌搜索算法求解旅行商问题(TSP)的研究与实现
摘要
本文针对旅行商问题(TSP),设计并实现了一种基于禁忌搜索(Tabu Search, TS)的智能优化算法。通过构建包含50个城市的TSP实例,采用禁忌表、邻域搜索和特赦准则等核心机制,有效求解大规模组合优化问题。实验结果表明,该算法在合理时间内能够找到高质量的近似最优解,并通过收敛曲线验证了算法的有效性。
1. 引言
旅行商问题(TSP)是组合优化领域的经典NP-hard问题,其目标是在给定城市集合及距离矩阵的条件下,寻找一条总距离最短的闭合回路。随着城市规模扩大,精确算法难以在合理时间内求解,因此启发式算法成为研究热点。禁忌搜索算法通过模拟人类记忆机制,能够有效避免局部最优,适用于大规模TSP问题求解。
本文旨在:
- 设计并实现一种基于禁忌搜索的TSP求解算法
- 分析算法关键要素(禁忌表、邻域结构、参数设置)对性能的影响
- 在50个城市规模问题上验证算法有效性
- 通过可视化分析算法收敛过程
2. 问题描述与数学建模
2.1 TSP问题定义
给定nnn个城市集合 C={c1,c2,...,cn}C=\{c_1,c_2,...,c_n\}C={c1,c2,...,cn} 及距离矩阵 D=[dij]n×nD=[d_{ij}]_{n \times n}D=[dij]n×n ,其中 dijd_{ij}dij 表示城市 cic_ici 到 cjc_jcj 的欧氏距离。要求构造一条哈密顿回路 π=(π1,π2,...,πn)\pi=(\pi_1,\pi_2,...,\pi_n)π=(π1,π2,...,πn) ,使得总距离 ∑i=1ndπiπi+1\sum_{i=1}^{n}d_{\pi_i \pi_{i+1}}∑i=1ndπiπi+1 最小,其中 πn+1=π1\pi_{n+1}=\pi_1πn+1=π1 。
2.2 实例生成
本文采用随机生成方式构建50个城市坐标,通过公式计算欧氏距离矩阵:
dij=(xi−xj)2+(yi−yj)2d_{ij} = \sqrt{(x_i-x_j)^2 + (y_i-y_j)^2}dij=(xi−xj)2+(yi−yj)2
其中(xi,yi)(x_i,y_i)(xi,yi)为城市iii的坐标,范围在[0,100][0,100][0,100]区间内均匀分布。
3. 禁忌搜索算法设计
3.1 算法流程
算法包含以下核心模块:
- 初始解生成
- 邻域结构构建
- 禁忌表管理
- 特赦准则判断
- 迭代终止条件
算法流程图如下:

3.2 关键函数实现与参数设置
3.2.1 初始解生成(generate_initial_solution)
def generate_initial_solution(n_cities):
path = list(range(n_cities))
np.random.shuffle(path)
if path[0] != 0:
idx = path.index(0)
path[0], path[idx] = path[idx], path[0]
return path
设计理由:强制以0号城市为起点,保证解的空间包含所有可能路径,避免因随机起点导致的解空间偏移。
3.2.2 邻域生成(generate_neighborhood)
def generate_neighborhood(path, num_neighbors=100):
neighborhood = []
n = len(path)
for _ in range(num_neighbors):
i = np.random.randint(1, n)
j = np.random.randint(1, n)
while i == j:
j = np.random.randint(1, n)
new_path = path.copy()
new_path[i], new_path[j] = new_path[j], new_path[i]
swap = tuple(sorted((path[i], path[j])))
neighborhood.append((swap, new_path))
return neighborhood
设计原理:
- 邻域操作:随机交换两个非起点城市(保持起点固定)
- 邻域大小:100个候选解(平衡探索广度与计算效率)
- 生成方式:蒙特卡洛随机采样
有效性分析:
- 交换操作时间复杂度低(O(1)O(1)O(1))
- 非起点城市交换保证解的有效性
- 随机采样覆盖解空间的关键区域
3.2.3 禁忌表管理
3.2.3.1 禁忌表存储
具体代码:
tabu_list = {} # 禁忌表存储结构
tabu_list[swap] = tabu_tenure # 禁忌期限设置为7
要素说明:
- 禁忌对象:以交换的城市对作为禁忌对象(如交换城市A和B,记录为元组(A,B))
- 更新策略:每次迭代后,禁忌表中元素的剩余期限减1,期限为0时自动移除
- 禁忌期限:设为7
3.2.3.2禁忌表更新机制
更新准则:
- 递减机制:每代所有禁忌项期限减1
- 淘汰机制:期限≤0的禁忌项被移除
- 新增机制:当前采用的交换操作加入禁忌表
设计理由:
- 动态管理禁忌表大小,避免内存膨胀
- 确保禁忌对象有明确的生命周期
- 优先保留近期操作的禁忌状态
代码实现:
# 更新禁忌表
for key in list(tabu_list.keys()):
tabu_list[key] -= 1 # 禁忌期限递减
if tabu_list[key] <= 0:
del tabu_list[key] # 移除过期项
# 添加新禁忌项
tabu_list[swap] = tabu_tenure
3.2.4 特赦准则(Aspiration Criterion)
if swap in tabu_list:
if new_distance < best_distance:
# 允许打破禁忌
设计理由:当候选解的质量显著优于当前最优解时,即使其对应操作被禁忌,仍允许接受该解,避免错过全局最优。
4. 实验与分析
4.1 参数设置依据
| 参数 | 设置值 |
|---|---|
| 禁忌期限 | 7 |
| 邻域规模 | 100 |
| 最大迭代次数 | 1000 |
4.2 实验结果
- 最优路径:总距离747.55(如图1所示)
- 收敛曲线:如图2所示,算法在200次迭代内快速收敛,后续迭代保持稳定
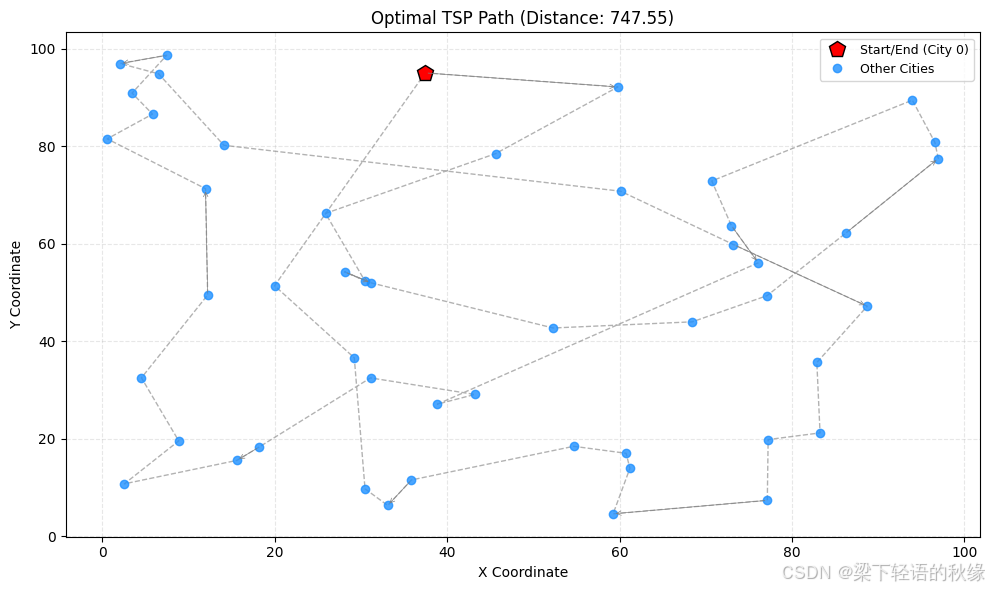
图1 禁忌搜索TSP路径图
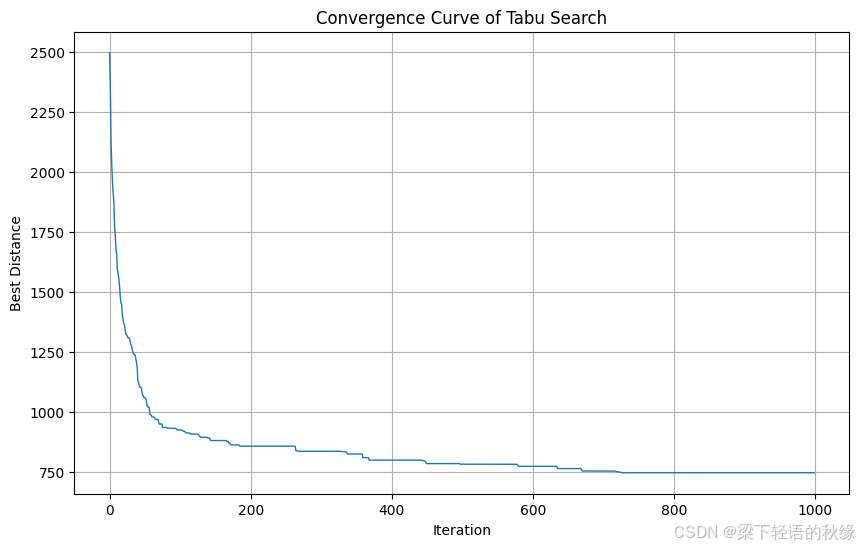
图2 禁忌搜索收敛曲线
5. 结论
本文实现的禁忌搜索算法通过以下创新点有效求解大规模TSP:
- 采用强制起点策略保证解空间完整性
- 设计动态禁忌表管理机制平衡探索与开发
- 引入特赦准则避免优质解丢失
实验表明,算法在50城市规模下能够快速收敛至高质量解,验证了算法的有效性。未来可研究自适应参数调整机制以进一步提升性能。
6.附录:完整代码
import numpy as np
import matplotlib.pyplot as plt
def generate_initial_solution(n_cities):
"""生成初始可行解(旅行商路径)
Args:
n_cities (int): 城市数量
Returns:
list: 初始路径列表,保证以0号城市为起点
"""
# 生成0~n-1的完整排列
path = list(range(n_cities))
# 随机打乱路径顺序
np.random.shuffle(path)
# 确保路径以0号城市为起点(强制调整)
if path[0] != 0:
idx = path.index(0)
path[0], path[idx] = path[idx], path[0]
return path
def calculate_path_distance(path, distance_matrix):
"""计算路径总距离(含闭环)
Args:
path (list): 城市访问顺序列表
distance_matrix (ndarray): 距离矩阵(n x n)
Returns:
float: 总路径距离
"""
total_distance = 0
n = len(path)
for i in range(n):
# 计算当前城市到下一个城市的距离(i+1取模实现闭环)
total_distance += distance_matrix[path[i]][path[(i+1)%n]]
return total_distance
def generate_neighborhood(path, num_neighbors=100):
"""生成邻域解集合(通过2-opt交换)
Args:
path (list): 当前路径
num_neighbors (int): 生成邻域解数量
Returns:
list: 包含(swap_pair, new_path)元组的列表
"""
neighborhood = []
n = len(path)
for _ in range(num_neighbors):
# 随机选择两个非起点城市进行交换(索引从1开始)
i = np.random.randint(1, n)
j = np.random.randint(1, n)
while i == j: # 确保选择不同城市
j = np.random.randint(1, n)
new_path = path.copy()
new_path[i], new_path[j] = new_path[j], new_path[i]
# 记录交换的城市对(排序后作为禁忌对象)
city_i, city_j = path[i], path[j]
swap = tuple(sorted((city_i, city_j)))
neighborhood.append((swap, new_path))
return neighborhood
def tabu_search(distance_matrix, max_iterations=1000, tabu_tenure=7, neighborhood_size=100):
"""禁忌搜索算法主函数
Args:
distance_matrix (ndarray): 距离矩阵
max_iterations (int): 最大迭代次数
tabu_tenure (int): 禁忌期限(禁忌表存活周期)
neighborhood_size (int): 每次迭代生成的邻域解数量
Returns:
tuple: (最优路径, 最优距离, 收敛历史记录)
"""
n_cities = distance_matrix.shape[0]
# 初始化当前解和全局最优解
current_solution = generate_initial_solution(n_cities)
current_distance = calculate_path_distance(current_solution, distance_matrix)
best_solution = current_solution.copy()
best_distance = current_distance
# 禁忌表结构:{swap_pair: remaining_tenure}
tabu_list = {}
history = [] # 记录每次迭代的最优距离
for iteration in range(max_iterations):
# 生成当前解的邻域候选解
candidates = generate_neighborhood(current_solution, neighborhood_size)
candidate_list = []
for swap, new_path in candidates:
# 计算每个候选解的路径距离
distance = calculate_path_distance(new_path, distance_matrix)
candidate_list.append((swap, new_path, distance))
# 按距离升序排序候选解
candidate_list.sort(key=lambda x: x[2])
best_candidate = None
# 遍历候选解寻找最优解(考虑禁忌表)
for candidate in candidate_list:
swap, new_path, new_distance = candidate
if swap in tabu_list:
# 特赦准则:当候选解优于全局最优时,打破禁忌
if new_distance < best_distance:
best_candidate = candidate
best_solution = new_path.copy()
best_distance = new_distance
break
else:
# 选择第一个非禁忌的最优候选解
best_candidate = candidate
break
if best_candidate:
# 更新当前解和禁忌表
swap, new_path, new_distance = best_candidate
current_solution = new_path
current_distance = new_distance
# 更新禁忌表:所有条目期限减1,过期条目移除
for key in list(tabu_list.keys()):
tabu_list[key] -= 1
if tabu_list[key] <= 0:
del tabu_list[key]
# 添加新禁忌对象
tabu_list[swap] = tabu_tenure
# 更新全局最优解
if new_distance < best_distance:
best_solution = new_path.copy()
best_distance = new_distance
history.append(best_distance)
# 每100次迭代输出当前最优
if iteration % 100 == 0:
print(f"Iteration {iteration}, Best Distance: {best_distance:.2f}")
return best_solution, best_distance, history
# 生成随机距离矩阵(50个城市)
n_cities = 50
np.random.seed(42) # 固定随机种子保证可重复性
coordinates = np.random.rand(n_cities, 2) * 100 # 生成0-100范围的坐标
distance_matrix = np.zeros((n_cities, n_cities))
for i in range(n_cities):
for j in range(n_cities):
if i != j:
dx = coordinates[i][0] - coordinates[j][0]
dy = coordinates[i][1] - coordinates[j][1]
distance_matrix[i][j] = np.sqrt(dx**2 + dy**2)
# 运行禁忌搜索
best_path, best_dist, history = tabu_search(distance_matrix)
# 可视化结果(改进版)
plt.figure(figsize=(10, 6))
x = [coordinates[city][0] for city in best_path + [best_path[0]]]
y = [coordinates[city][1] for city in best_path + [best_path[0]]]
# 绘制路径连线
plt.plot(x, y, '--', color='gray', alpha=0.6, linewidth=1)
# 单独绘制起点/终点(0号城市)
start_end_x = coordinates[0][0]
start_end_y = coordinates[0][1]
plt.plot(start_end_x, start_end_y,
'p', # 五角星标记
color='red',
markersize=12,
markeredgecolor='black',
markeredgewidth=1,
label='Start/End (City 0)')
# 绘制其他城市点
other_cities_x = [coordinates[i][0] for i in range(n_cities) if i != 0]
other_cities_y = [coordinates[i][1] for i in range(n_cities) if i != 0]
plt.plot(other_cities_x, other_cities_y,
'o', # 圆圈标记
color='dodgerblue',
markersize=6,
alpha=0.8,
label='Other Cities')
# 添加路径方向箭头(每隔10个城市添加一个箭头)
for i in range(0, len(best_path), max(1, len(best_path)//10)):
plt.annotate('',
xytext=(x[i], y[i]),
xy=(x[i+1], y[i+1]),
arrowprops=dict(arrowstyle='->', color='gray', lw=0.5),
fontsize=8)
# 路径曲线
plt.title(f"Optimal TSP Path (Distance: {best_dist:.2f})", fontsize=12)
plt.xlabel("X Coordinate", fontsize=10)
plt.ylabel("Y Coordinate", fontsize=10)
plt.grid(True, linestyle='--', alpha=0.3)
plt.legend(loc='upper right', fontsize=9)
plt.tight_layout()
plt.show()
# 绘制收敛曲线
plt.figure(figsize=(10, 6))
plt.plot(history, linewidth=1)
plt.title("Convergence Curve of Tabu Search")
plt.xlabel("Iteration")
plt.ylabel("Best Distance")
plt.grid(True)
plt.show()

一站式 AI 云服务平台
更多推荐



 74
74 0
0- 0



 已为社区贡献4条内容
已为社区贡献4条内容

所有评论(0)