
python计算机视觉编程第五章 多视图几何
多视图几何(Multiple View Geometry)是计算机视觉领域的一个重要概念,它涉及到从多个不同视角(角度)获取的图像中推断出物体的三维结构和相对位置关系。在现实世界中,我们通常通过不同的角度观察物体,然后通过这些不同的视角来理解物体的形状、位置和运动。多视图几何的目标就是从这些多个视图中恢复出物体的几何信息。主要内容有:三维重建、立体视觉、运动估计等。
多视图几何
多视图几何(Multiple View Geometry)是计算机视觉领域的一个重要概念,它涉及到从多个不同视角(角度)获取的图像中推断出物体的三维结构和相对位置关系。在现实世界中,我们通常通过不同的角度观察物体,然后通过这些不同的视角来理解物体的形状、位置和运动。多视图几何的目标就是从这些多个视图中恢复出物体的几何信息。
主要内容有:三维重建、立体视觉、运动估计等。
外极几何
外极几何是研究两幅图像之间存在的几何。它和场景结构无关,只依赖于摄像机的内外参数。
此处我们假设照相机的内参都标定过了,只有外参未知。为了方便,通常将外参的远点和坐标轴与第一个相机对齐,那么就有
P1=K1[I∣0]和P2=K2[R∣t]P_1 = K_1[I|0]和P_2 = K_2[R|t]P1=K1[I∣0]和P2=K2[R∣t]
其中K1和K2K_1和K_2K1和K2是标定矩阵,是已知的。I和R分别是两个相机的旋转矩阵,t是第二个相机的平移量(因为我们认为第一个相机在原点,所以是0)。利用这些参数,我们就可以得到真实的点X的投影点,x1,x2x_1,x_2x1,x2的关系。也可以从x1,x2x_1,x_2x1,x2反推这些参数。
同一个图像点经过不同的投影矩阵产生的不同投影点必须满足:
x2TFx1=0\mathbf{x}_2^TF\mathbf{x}_1=0x2TFx1=0
其中:
F=K2−TStRK1−1F=K_2^{-T}S_tRK_1^{-1}F=K2−TStRK1−1
矩阵StS_tSt为反对称矩阵:
St=[0−t3t2t30−t1−t2t10]\boldsymbol{S}_\mathrm{t}=\begin{bmatrix}0&-t_3&t_2\\[0.3em]t_3&0&-t_1\\[0.3em]-t_2&t_1&0\end{bmatrix}St=
0t3−t2−t30t1t2−t10
由平移t组成。F称为基础矩阵,由于反对称矩阵行列式为0,故F的秩小于等于2。
我们可以借助F恢复照相机参数,F可以从对应的投影图像点计算X,K未知情况下,可以恢复出投影变换矩阵§,K已知,可以在三维重建中正确表示距离和角度。
x2TFx1=l1Tx1=0x_2^T Fx_1 = l_1^Tx_1=0x2TFx1=l1Tx1=0,找到第一幅图像的 一条直线 l1Tx1=0l_1^Tx_1=0l1Tx1=0,第二个点在第一幅图像中的对应点一定在这条线(x2x_2x2的外极线上),两条外极线都经过一个外极点e,是另一个照相机光心对应的图像点,Fe1=e2tF=0Fe_1 = e_2^tF = 0Fe1=e2tF=0。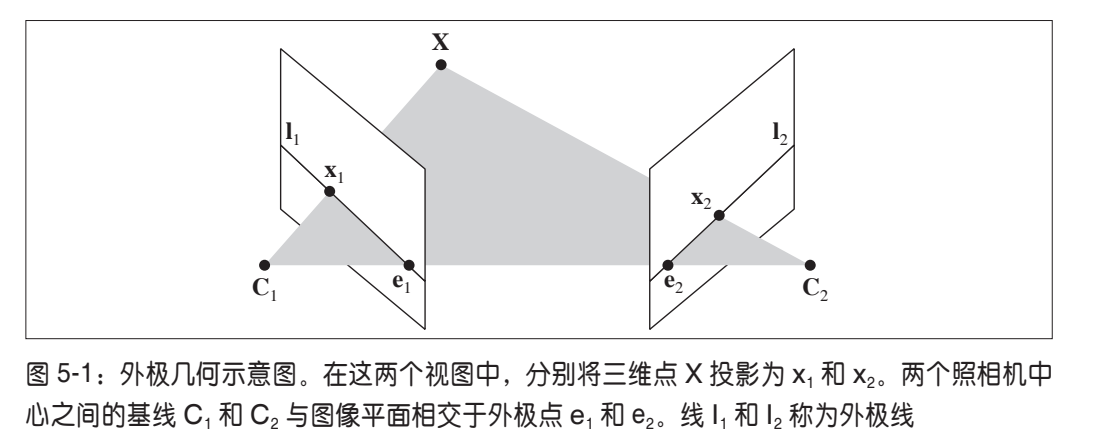
简单的数据集
我们先来读取一个简单的数据集:
from numpy import *
import scipy
from matplotlib import pyplot as plt
import cv2
class Camera(object):
""" Class for representing pin-hole cameras. """
def __init__(self,P):
""" Initialize P = K[R|t] camera model. """
self.P = P
# 标定矩阵
self.K = None # calibration matrix
self.R = None # rotation
self.t = None # translation
# 照相机中心
self.c = None # camera center
def project(self,X):
""" Project points in X (4*n array) and normalize coordinates. """
#定义和坐标归一化
# (3,n)
x = dot(self.P,X)
for i in range(3):
x[i] /= x[2]
return x
def rotation_matrix(self,a):
""" Creates a 3D rotation matrix for rotation
around the axis of the vector a. """
# 旋转矩阵
R = eye(4)
R[:3,:3] = scipy.linalg.expm([[0,-a[2],a[1]],[a[2],0,-a[0]],[-a[1],a[0],0]])
return R
def factor(self):
""" Factorize the camera matrix into K,R,t as P = K[R|t]. """
# 分解前三列
K,R = scipy.linalg.rq(self.P[:,:3])
# 分解后三列
T = diag(sign(diag(K)))
if linalg.det(T) < 0:
T[1,1] *= -1
self.K = dot(K,T)
self.R = dot(T,R) # T is its own inverse
self.t = dot(linalg.inv(self.K),self.P[:,3])
return self.K, self.R, self.t
def my_calibration(sz):
"""
Calibration function for the camera (iPhone4) used in this example.
"""
row, col = sz
fx = 2555*col/2592
fy = 2586*row/1936
K = diag([fx, fy, 1])
K[0, 2] = 0.5*col
K[1, 2] = 0.5*row
return K
# 生成齐次坐标
def make_homog(points):
"""Convert points to homogeneous coordinates."""
return vstack((points,ones((1,points.shape[1]))))
def normalize(points):
""" Normalize a collection of points in
homogeneous coordinates so that last row = 1. """
for row in points:
row /= points[-1]
return points
from PIL import Image
from numpy import *
from pylab import *
# 载入一些图像
im1 = array(Image.open('images/001.jpg'))
im2 = array(Image.open('images/002.jpg'))
# 载入每个视图的二维点到列表中
points2D = [loadtxt('2D/00'+str(i+1)+'.corners').T for i in range(3)]
# 载入三维点
points3D = loadtxt('3D/p3d').T
# 载入对应
corr = genfromtxt('2D/nview-corners',dtype='int')
# 载入照相机矩阵到 Camera 对象列表中
P = [Camera(loadtxt('2D/00'+str(i+1)+'.P')) for i in range(3)]
# 将三维点转换成齐次坐标表示,并投影
X = vstack( (points3D,ones(points3D.shape[1])) )
x = P[0].project(X)
# 在视图 1 中绘制点
figure()
imshow(im1)
plot(points2D[0][0],points2D[0][1],'*')
axis('off')
figure()
imshow(im1)
plot(x[0],x[1],'r.')
axis('off')
show()
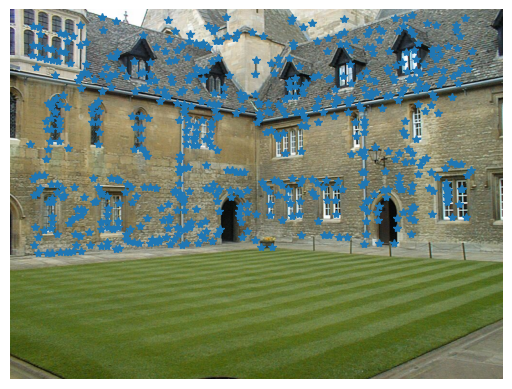
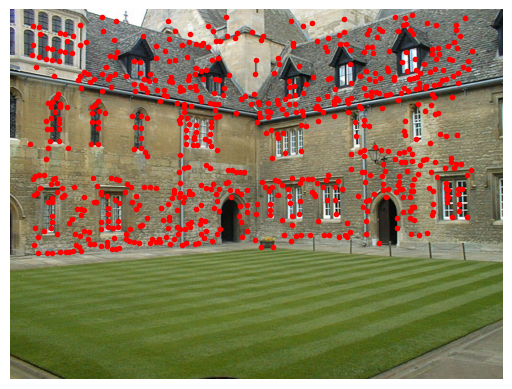
按照书上的说法,第二张图比第一张的点要多一些,多出来的点是从其他图片中重建出来的。我看了一会儿并没有发现有多很多点,猜测这可能是因为数据量太小的原因。
用Matplotlib绘制三维数据
使用下面的代码
from mpl_toolkits.mplot3d import axes3d
fig = figure()
ax = fig.add_subplot(projection='3d')
X,Y,Z = axes3d.get_test_data(0.25)
# 在三维中绘制点
ax.plot(X.flatten(),Y.flatten(),Z.flatten(),'o')
show()
即可得到下面的结果: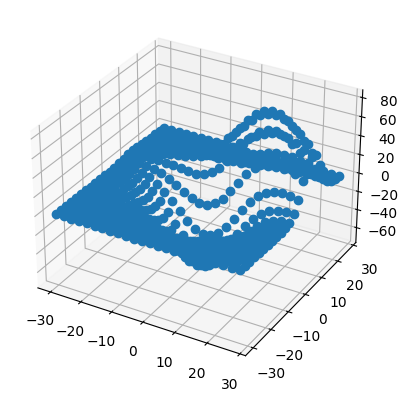
值得注意的是,书上的代码用的是fig.gca(projection=‘3d’)
,这个函数经我测试已经跑不通了,因此我改用了fig.add_subplot(projection=‘3d’)
计算F:八点法
八点法是通过对应点来计算基础矩阵的算法,外极约束可以写成线性系统的形式。
[x21x11x21y11x21w11⋯w21w11x22x12x22y12x22w12⋯w22w12⋮⋮⋮⋱⋮x2nx1nx2ny1nx2nw1n⋯w2nw1n][F11F12F13⋮F33]=Af=0\begin{bmatrix}x_2^1x_1^1&x_2^1y_1^1&x_2^1w_1^1&\cdots&w_2^1w_1^1\\x_2^2x_1^2&x_2^2y_1^2&x_2^2w_1^2&\cdots&w_2^2w_1^2\\\vdots&\vdots&\vdots&\ddots&\vdots\\x_2^nx_1^n&x_2^ny_1^n&x_2^nw_1^n&\cdots&w_2^nw_1^n\end{bmatrix}\begin{bmatrix}F_{11}\\F_{12}\\F_{13}\\\vdots\\F_{33}\end{bmatrix}=A\boldsymbol{f}=0
x21x11x22x12⋮x2nx1nx21y11x22y12⋮x2ny1nx21w11x22w12⋮x2nw1n⋯⋯⋱⋯w21w11w22w12⋮w2nw1n
F11F12F13⋮F33
=Af=0
其中,f包含F的元素,x1i和x2ix_1^i和x_2^ix1i和x2i是一对图像点,共有n对对应点。基础矩阵中有 9 个元素,由于尺度是任意的,所以只需要 8 个方程。因为算法中需要 8 个对应点来计算基础矩阵 F,所以该算法叫做八点法。
八点法中最小化||Af||的函数:
def compute_fundamental(x1,x2):
""" 使用归一化的八点算法,从对应点(x1,x2 3×n 的数组)中计算基础矩阵
每行由如下构成:
[x'*x,x'*y' x', y'*x, y'*y, y', x, y, 1]"""
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
# 创建方程对应的矩阵
A = zeros((n,9))
for i in range(n):
A[i] = [x1[0,i]*x2[0,i], x1[0,i]*x2[1,i], x1[0,i]*x2[2,i],
x1[1,i]*x2[0,i], x1[1,i]*x2[1,i], x1[1,i]*x2[2,i],
x1[2,i]*x2[0,i], x1[2,i]*x2[1,i], x1[2,i]*x2[2,i] ]
# 计算线性最小二乘解
U,S,V = linalg.svd(A)
# V的最后一行有9个元素
F = V[-1].reshape(3,3)
# 受限 F
# 通过将最后一个奇异值置 0,使秩为 2
U,S,V = linalg.svd(F)
S[2] = 0
F = dot(U,dot(diag(S),V))
return F
外极点和外极线
外极点们组Fe1=0Fe_1 = 0Fe1=0,因此可以通过计算F的零空间来得到。
def compute_epipole(F):
""" 从基础矩阵 F 中计算右极点(可以使用 F.T 获得左极点)"""
# 返回 F 的零空间(Fx=0)
U,S,V = linalg.svd(F)
e = V[-1]
# 归一化
return e/e[2]
若想获得另一幅图像的外极点,只需将F转置后输入上述函数即可。
在Merton数据集的前两个视图上运行这两个函数: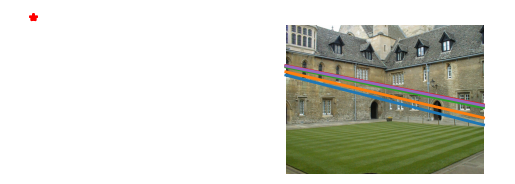
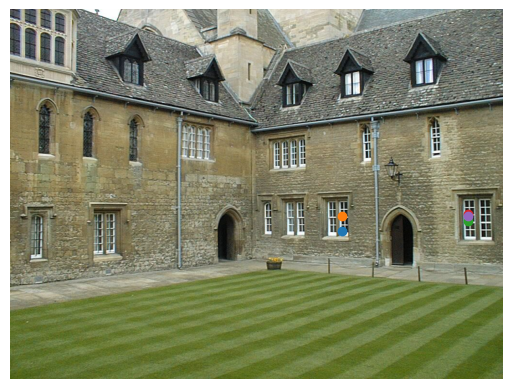
第一个视图画出了前5个外极线,第二个视图中画出了对应匹配点,可以看到,这些线在图片外左侧位置将相交于一点(就是那个红点,我给画出来了)。外极线上一定存在着另一个图像的对应点。
完整代码:
from numpy import *
import scipy
from matplotlib import pyplot as plt
import cv2
class Camera(object):
""" Class for representing pin-hole cameras. """
def __init__(self,P):
""" Initialize P = K[R|t] camera model. """
self.P = P
# 标定矩阵
self.K = None # calibration matrix
self.R = None # rotation
self.t = None # translation
# 照相机中心
self.c = None # camera center
def project(self,X):
""" Project points in X (4*n array) and normalize coordinates. """
#定义和坐标归一化
# (3,n)
x = dot(self.P,X)
for i in range(3):
x[i] /= x[2]
return x
def rotation_matrix(self,a):
""" Creates a 3D rotation matrix for rotation
around the axis of the vector a. """
# 旋转矩阵
R = eye(4)
R[:3,:3] = scipy.linalg.expm([[0,-a[2],a[1]],[a[2],0,-a[0]],[-a[1],a[0],0]])
return R
def factor(self):
""" Factorize the camera matrix into K,R,t as P = K[R|t]. """
# 分解前三列
K,R = scipy.linalg.rq(self.P[:,:3])
# 分解后三列
T = diag(sign(diag(K)))
if linalg.det(T) < 0:
T[1,1] *= -1
self.K = dot(K,T)
self.R = dot(T,R) # T is its own inverse
self.t = dot(linalg.inv(self.K),self.P[:,3])
return self.K, self.R, self.t
def my_calibration(sz):
"""
Calibration function for the camera (iPhone4) used in this example.
"""
row, col = sz
fx = 2555*col/2592
fy = 2586*row/1936
K = diag([fx, fy, 1])
K[0, 2] = 0.5*col
K[1, 2] = 0.5*row
return K
# 生成齐次坐标
def make_homog(points):
"""Convert points to homogeneous coordinates."""
return vstack((points,ones((1,points.shape[1]))))
def normalize(points):
""" Normalize a collection of points in
homogeneous coordinates so that last row = 1. """
for row in points:
row /= points[-1]
return points
def compute_fundamental(x1,x2):
""" 使用归一化的八点算法,从对应点(x1,x2 3×n 的数组)中计算基础矩阵
每行由如下构成:
[x'*x,x'*y' x', y'*x, y'*y, y', x, y, 1]"""
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
# 创建方程对应的矩阵
A = zeros((n,9))
for i in range(n):
A[i] = [x1[0,i]*x2[0,i], x1[0,i]*x2[1,i], x1[0,i]*x2[2,i],
x1[1,i]*x2[0,i], x1[1,i]*x2[1,i], x1[1,i]*x2[2,i],
x1[2,i]*x2[0,i], x1[2,i]*x2[1,i], x1[2,i]*x2[2,i] ]
# 计算线性最小二乘解
U,S,V = linalg.svd(A)
# V的最后一行有9个元素
F = V[-1].reshape(3,3)
# 受限 F
# 通过将最后一个奇异值置 0,使秩为 2
U,S,V = linalg.svd(F)
S[2] = 0
F = dot(U,dot(diag(S),V))
return F
def compute_epipole(F):
""" 从基础矩阵 F 中计算右极点(可以使用 F.T 获得左极点)"""
# 返回 F 的零空间(Fx=0)
U,S,V = linalg.svd(F)
e = V[-1]
# 归一化
return e/e[2]
def plot_epipolar_line(im,F,x,epipole=None,show_epipole=True):
""" 在图像中,绘制外极点和外极线 F×x=0。F 是基础矩阵,x 是另一幅图像中的点 """
m,n = im.shape[:2]
line = dot(F,x)
# 外极线参数和值
t = linspace(0,n,100)
lt = array([(line[2]+line[0]*tt)/(-line[1]) for tt in t])
# 仅仅处理位于图像内部的点和线
ndx = (lt>=0) & (lt<m)
plt.plot(t[ndx],lt[ndx],linewidth=2)
if show_epipole:
if epipole is None:
epipole = compute_epipole(F)
plt.plot(epipole[0]/epipole[2],epipole[1]/epipole[2],'r*')
from PIL import Image
from numpy import *
from pylab import *
# 载入一些图像
im1 = array(Image.open('images/001.jpg'))
im2 = array(Image.open('images/002.jpg'))
# 载入每个视图的二维点到列表中
points2D = [loadtxt('2D/00'+str(i+1)+'.corners').T for i in range(3)]
# 载入三维点
points3D = loadtxt('3D/p3d').T
# 载入对应
corr = genfromtxt('2D/nview-corners',dtype='int')
# 载入照相机矩阵到 Camera 对象列表中
P = [Camera(loadtxt('2D/00'+str(i+1)+'.P')) for i in range(3)]
# 将三维点转换成齐次坐标表示,并投影
X = vstack( (points3D,ones(points3D.shape[1])) )
x = P[0].project(X)
# 在视图 1 中绘制点
figure()
imshow(im1)
plot(points2D[0][0],points2D[0][1],'*')
axis('off')
figure()
imshow(im1)
plot(x[0],x[1],'r.')
axis('off')
show()
# 在前两个视图中点的索引
# 第一/二个视图中>0的部分取交集
ndx = (corr[:,0]>=0) & (corr[:,1]>=0)
# 获得坐标,并将其用齐次坐标表示
x1 = points2D[0][:,corr[ndx,0]]
x1 = vstack( (x1,ones(x1.shape[1])) )
x2 = points2D[1][:,corr[ndx,1]]
x2 = vstack( (x2,ones(x2.shape[1])) )
# 计算 F
F = compute_fundamental(x1,x2)
# 计算极点
e = compute_epipole(F)
# 绘制图像
figure()
imshow(im1)
# 分别绘制每条线,这样会绘制出很漂亮的颜色
for i in range(5):
plot_epipolar_line(im1,F,x2[:,i],e,False)
# plot(x2[0,i],x2[1,i],'o')
axis('off')
figure()
imshow(im2)
# 分别绘制每个点,这样会绘制出和线同样的颜色
for i in range(5):
plot(x2[0,i],x2[1,i],'o')
axis('off')
show()
照相机和三维结构的计算
三角剖分
给定照相机参数模型,图像可通过三角剖分来恢复出这些点的三维位置。照相机方程关系定义如下:
[P1−x10P20−x2][Xλ1λ2]=0\begin{bmatrix}P_1&-\mathbf{x}_1&0\\P_2&0&-\mathbf{x}_2\end{bmatrix}\begin{bmatrix}\mathbf{X}\\\lambda_1\\\lambda_2\end{bmatrix}=0[P1P2−x100−x2]
Xλ1λ2
=0
由于图像噪声、照相机参数误差和其他系统误差,上面的方程可能没有精确解。我
们可以通过 SVD 算法来得到三维点的最小二乘估值:
def triangulate_point(x1,x2,P1,P2):
""" 使用最小二乘解,绘制点对的三角剖分 """
M = zeros((6,6))
M[:3,:4] = P1
M[3:,:4] = P2
M[:3,4] = -x1
M[3:,5] = -x2
U,S,V = linalg.svd(M)
X = V[-1,:4]
return X / X[3]
最小二乘解的前4个值就是齐次坐标系下的三维坐标
增加下列函数实现多个点的三角剖分:
def triangulate(x1,x2,P1,P2):
""" x1 和 x2(3×n 的齐次坐标表示)中点的二视图三角剖分 """
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
X = [ triangulate_point(x1[:,i],x2[:,i],P1,P2) for i in range(n)]
return array(X).T
这个函数的输入是两个图像点数组,输出为一个三维坐标数组。
我们可以利用下面的代码来实现 Merton1 数据集上的三角剖分:
from numpy import *
import scipy
from matplotlib import pyplot as plt
import cv2
class Camera(object):
""" Class for representing pin-hole cameras. """
def __init__(self,P):
""" Initialize P = K[R|t] camera model. """
self.P = P
# 标定矩阵
self.K = None # calibration matrix
self.R = None # rotation
self.t = None # translation
# 照相机中心
self.c = None # camera center
def project(self,X):
""" Project points in X (4*n array) and normalize coordinates. """
#定义和坐标归一化
# (3,n)
x = dot(self.P,X)
for i in range(3):
x[i] /= x[2]
return x
def rotation_matrix(self,a):
""" Creates a 3D rotation matrix for rotation
around the axis of the vector a. """
# 旋转矩阵
R = eye(4)
R[:3,:3] = scipy.linalg.expm([[0,-a[2],a[1]],[a[2],0,-a[0]],[-a[1],a[0],0]])
return R
def factor(self):
""" Factorize the camera matrix into K,R,t as P = K[R|t]. """
# 分解前三列
K,R = scipy.linalg.rq(self.P[:,:3])
# 分解后三列
T = diag(sign(diag(K)))
if linalg.det(T) < 0:
T[1,1] *= -1
self.K = dot(K,T)
self.R = dot(T,R) # T is its own inverse
self.t = dot(linalg.inv(self.K),self.P[:,3])
return self.K, self.R, self.t
def my_calibration(sz):
"""
Calibration function for the camera (iPhone4) used in this example.
"""
row, col = sz
fx = 2555*col/2592
fy = 2586*row/1936
K = diag([fx, fy, 1])
K[0, 2] = 0.5*col
K[1, 2] = 0.5*row
return K
# 生成齐次坐标
def make_homog(points):
"""Convert points to homogeneous coordinates."""
return vstack((points,ones((1,points.shape[1]))))
def normalize(points):
""" Normalize a collection of points in
homogeneous coordinates so that last row = 1. """
for row in points:
row /= points[-1]
return points
def compute_fundamental(x1,x2):
""" 使用归一化的八点算法,从对应点(x1,x2 3×n 的数组)中计算基础矩阵
每行由如下构成:
[x'*x,x'*y' x', y'*x, y'*y, y', x, y, 1]"""
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
# 创建方程对应的矩阵
A = zeros((n,9))
for i in range(n):
A[i] = [x1[0,i]*x2[0,i], x1[0,i]*x2[1,i], x1[0,i]*x2[2,i],
x1[1,i]*x2[0,i], x1[1,i]*x2[1,i], x1[1,i]*x2[2,i],
x1[2,i]*x2[0,i], x1[2,i]*x2[1,i], x1[2,i]*x2[2,i] ]
# 计算线性最小二乘解
U,S,V = linalg.svd(A)
# V的最后一行有9个元素
F = V[-1].reshape(3,3)
# 受限 F
# 通过将最后一个奇异值置 0,使秩为 2
U,S,V = linalg.svd(F)
S[2] = 0
F = dot(U,dot(diag(S),V))
return F
def compute_epipole(F):
""" 从基础矩阵 F 中计算右极点(可以使用 F.T 获得左极点)"""
# 返回 F 的零空间(Fx=0)
U,S,V = linalg.svd(F)
e = V[-1]
# 归一化
return e/e[2]
def plot_epipolar_line(im,F,x,epipole=None,show_epipole=True):
""" 在图像中,绘制外极点和外极线 F×x=0。F 是基础矩阵,x 是另一幅图像中的点 """
m,n = im.shape[:2]
line = dot(F,x)
# 外极线参数和值
t = linspace(0,n,100)
lt = array([(line[2]+line[0]*tt)/(-line[1]) for tt in t])
# 仅仅处理位于图像内部的点和线
ndx = (lt>=0) & (lt<m)
plt.plot(t[ndx],lt[ndx],linewidth=2)
if show_epipole:
if epipole is None:
epipole = compute_epipole(F)
plt.plot(epipole[0]/epipole[2],epipole[1]/epipole[2],'r*')
def triangulate_point(x1,x2,P1,P2):
""" 使用最小二乘解,绘制点对的三角剖分 """
M = zeros((6,6))
M[:3,:4] = P1
M[3:,:4] = P2
M[:3,4] = -x1
M[3:,5] = -x2
U,S,V = linalg.svd(M)
X = V[-1,:4]
return X / X[3]
def triangulate(x1,x2,P1,P2):
""" x1 和 x2(3×n 的齐次坐标表示)中点的二视图三角剖分 """
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
X = [ triangulate_point(x1[:,i],x2[:,i],P1,P2) for i in range(n)]
return array(X).T
from PIL import Image
from numpy import *
from pylab import *
# 载入一些图像
im1 = array(Image.open('images/001.jpg'))
im2 = array(Image.open('images/002.jpg'))
# 载入每个视图的二维点到列表中
points2D = [loadtxt('2D/00'+str(i+1)+'.corners').T for i in range(3)]
# 载入三维点
points3D = loadtxt('3D/p3d').T
# 载入对应
corr = genfromtxt('2D/nview-corners',dtype='int')
# 载入照相机矩阵到 Camera 对象列表中
P = [Camera(loadtxt('2D/00'+str(i+1)+'.P')) for i in range(3)]
# 将三维点转换成齐次坐标表示,并投影
X = vstack( (points3D,ones(points3D.shape[1])) )
x = P[0].project(X)
# 前两个视图中点的索引
ndx = (corr[:,0]>=0) & (corr[:,1]>=0)
# 获取坐标,并用齐次坐标表示
x1 = points2D[0][:,corr[ndx,0]]
x1 = vstack( (x1,ones(x1.shape[1])) )
x2 = points2D[1][:,corr[ndx,1]]
x2 = vstack( (x2,ones(x2.shape[1])) )
Xtrue = points3D[:,ndx]
Xtrue = vstack( (Xtrue,ones(Xtrue.shape[1])) )
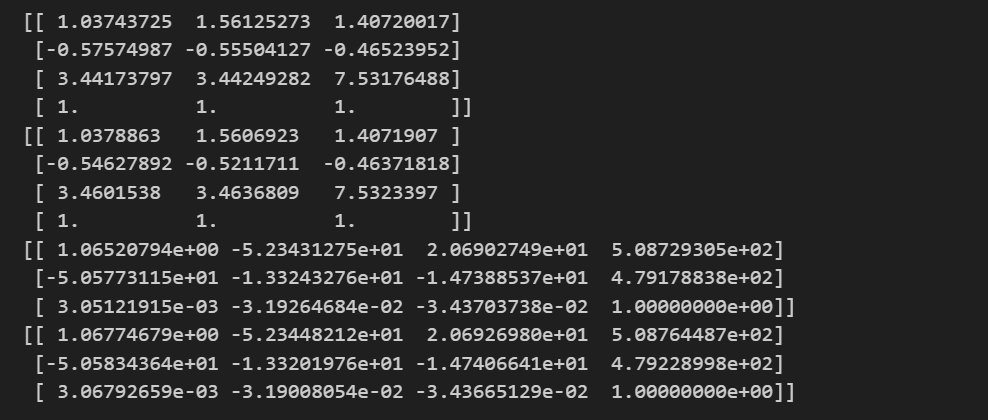
# 检查前三个点
Xest = triangulate(x1,x2,P[0].P,P[1].P)
print(Xest[:,:3])
print(Xtrue[:,:3])
# 绘制图像
from mpl_toolkits.mplot3d import axes3d
fig = plt.figure()
ax = fig.add_subplot(111,projection='3d')
ax.plot(Xest[0],Xest[1],Xest[2],'ko')
ax.plot(Xtrue[0],Xtrue[1],Xtrue[2],'r.')
plt.axis('equal')
plt.show()
上面的代码首先利用前两个视图的信息来对图像点进行三角剖分,然后把前三个图
像点的齐次坐标输出到控制台,最后绘制出恢复的最接近三维图像点: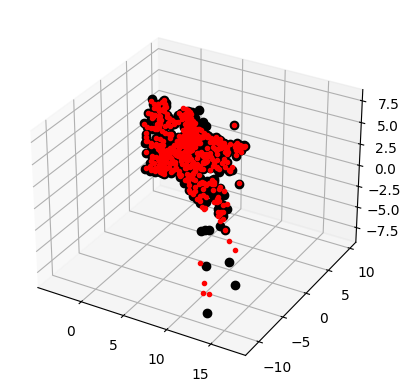
可以看到,算法估计出的三维图像点和实际图像点很接近。
由三维点计算照相机矩阵
本质上,这是三角剖分的逆问题,有时我们将其称为照相机反切法,恢复照相机矩阵同样是一个最小二乘问题。
按照λixi=PXi\boldsymbol{\lambda}_i\mathbf{x}_i\boldsymbol{=}\boldsymbol{P}\mathbf{X}_iλixi=PXi投影到xi=[xi,yi,1]\mathbf{x}_i{=}[x_i,y_i,1]xi=[xi,yi,1]可得
[X1T00−x100⋯0X1T0−y100⋯00X1T−100⋯X2T000−x20⋯0X2T00−y20⋯00X2T0−10⋯⋮⋮⋮⋮⋮⋮⋮][p1Tp2Tp3Tλ1λ2⋮]=0\begin{bmatrix}\mathbf{X}_1^T&0&0&-x_1&0&0&\cdots\\0&\mathbf{X}_1^T&0&-y_1&0&0&\cdots\\0&0&\mathbf{X}_1^T&-1&0&0&\cdots\\\mathbf{X}_2^T&0&0&0&-x_2&0&\cdots\\0&\mathbf{X}_2^T&0&0&-y_2&0&\cdots\\0&0&\mathbf{X}_2^T&0&-1&0&\cdots\\\vdots&\vdots&\vdots&\vdots&\vdots&\vdots&\vdots\end{bmatrix}\begin{bmatrix}\mathbf{p}_1^T\\\mathbf{p}_2^T\\\mathbf{p}_3^T\\\lambda_1\\\lambda_2\\\vdots\end{bmatrix}=0
X1T00X2T00⋮0X1T00X2T0⋮00X1T00X2T⋮−x1−y1−1000⋮000−x2−y2−1⋮000000⋮⋯⋯⋯⋯⋯⋯⋮
p1Tp2Tp3Tλ1λ2⋮
=0
def compute_P(x,X):
n = x.shape[1]
if X.shape[1] != n:
raise ValueError("Number of points don't match.")
# 创建用于计算 DLT 解的矩阵
M = zeros((3*n,12+n))
for i in range(n):
M[3*i,0:4] = X[:,i]
M[3*i+1,4:8] = X[:,i]
M[3*i+2,8:12] = X[:,i]
M[3*i:3*i+3,i+12] = -x[:,i]
U,S,V = linalg.svd(M)
return V[-1,:12].reshape((3,4))
最后一个特征向量的前12个元素是照相机矩阵的元素。
下面的代码会选出第一个视图中的一些可见点,将它们转换维齐次坐标表示,然后估计照相机矩阵:
from numpy import *
import scipy
from matplotlib import pyplot as plt
import cv2
class Camera(object):
""" Class for representing pin-hole cameras. """
def __init__(self,P):
""" Initialize P = K[R|t] camera model. """
self.P = P
# 标定矩阵
self.K = None # calibration matrix
self.R = None # rotation
self.t = None # translation
# 照相机中心
self.c = None # camera center
def project(self,X):
""" Project points in X (4*n array) and normalize coordinates. """
#定义和坐标归一化
# (3,n)
x = dot(self.P,X)
for i in range(3):
x[i] /= x[2]
return x
def rotation_matrix(self,a):
""" Creates a 3D rotation matrix for rotation
around the axis of the vector a. """
# 旋转矩阵
R = eye(4)
R[:3,:3] = scipy.linalg.expm([[0,-a[2],a[1]],[a[2],0,-a[0]],[-a[1],a[0],0]])
return R
def factor(self):
""" Factorize the camera matrix into K,R,t as P = K[R|t]. """
# 分解前三列
K,R = scipy.linalg.rq(self.P[:,:3])
# 分解后三列
T = diag(sign(diag(K)))
if linalg.det(T) < 0:
T[1,1] *= -1
self.K = dot(K,T)
self.R = dot(T,R) # T is its own inverse
self.t = dot(linalg.inv(self.K),self.P[:,3])
return self.K, self.R, self.t
def my_calibration(sz):
"""
Calibration function for the camera (iPhone4) used in this example.
"""
row, col = sz
fx = 2555*col/2592
fy = 2586*row/1936
K = diag([fx, fy, 1])
K[0, 2] = 0.5*col
K[1, 2] = 0.5*row
return K
# 生成齐次坐标
def make_homog(points):
"""Convert points to homogeneous coordinates."""
return vstack((points,ones((1,points.shape[1]))))
def normalize(points):
""" Normalize a collection of points in
homogeneous coordinates so that last row = 1. """
for row in points:
row /= points[-1]
return points
def compute_fundamental(x1,x2):
""" 使用归一化的八点算法,从对应点(x1,x2 3×n 的数组)中计算基础矩阵
每行由如下构成:
[x'*x,x'*y' x', y'*x, y'*y, y', x, y, 1]"""
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
# 创建方程对应的矩阵
A = zeros((n,9))
for i in range(n):
A[i] = [x1[0,i]*x2[0,i], x1[0,i]*x2[1,i], x1[0,i]*x2[2,i],
x1[1,i]*x2[0,i], x1[1,i]*x2[1,i], x1[1,i]*x2[2,i],
x1[2,i]*x2[0,i], x1[2,i]*x2[1,i], x1[2,i]*x2[2,i] ]
# 计算线性最小二乘解
U,S,V = linalg.svd(A)
# V的最后一行有9个元素
F = V[-1].reshape(3,3)
# 受限 F
# 通过将最后一个奇异值置 0,使秩为 2
U,S,V = linalg.svd(F)
S[2] = 0
F = dot(U,dot(diag(S),V))
return F
def compute_epipole(F):
""" 从基础矩阵 F 中计算右极点(可以使用 F.T 获得左极点)"""
# 返回 F 的零空间(Fx=0)
U,S,V = linalg.svd(F)
e = V[-1]
# 归一化
return e/e[2]
def plot_epipolar_line(im,F,x,epipole=None,show_epipole=True):
""" 在图像中,绘制外极点和外极线 F×x=0。F 是基础矩阵,x 是另一幅图像中的点 """
m,n = im.shape[:2]
line = dot(F,x)
# 外极线参数和值
t = linspace(0,n,100)
lt = array([(line[2]+line[0]*tt)/(-line[1]) for tt in t])
# 仅仅处理位于图像内部的点和线
ndx = (lt>=0) & (lt<m)
plt.plot(t[ndx],lt[ndx],linewidth=2)
if show_epipole:
if epipole is None:
epipole = compute_epipole(F)
plt.plot(epipole[0]/epipole[2],epipole[1]/epipole[2],'r*')
def triangulate_point(x1,x2,P1,P2):
""" 使用最小二乘解,绘制点对的三角剖分 """
M = zeros((6,6))
M[:3,:4] = P1
M[3:,:4] = P2
M[:3,4] = -x1
M[3:,5] = -x2
U,S,V = linalg.svd(M)
X = V[-1,:4]
return X / X[3]
def triangulate(x1,x2,P1,P2):
""" x1 和 x2(3×n 的齐次坐标表示)中点的二视图三角剖分 """
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
X = [ triangulate_point(x1[:,i],x2[:,i],P1,P2) for i in range(n)]
return array(X).T
from PIL import Image
from numpy import *
from pylab import *
# 载入一些图像
im1 = array(Image.open('images/001.jpg'))
im2 = array(Image.open('images/002.jpg'))
# 载入每个视图的二维点到列表中
points2D = [loadtxt('2D/00'+str(i+1)+'.corners').T for i in range(3)]
# 载入三维点
points3D = loadtxt('3D/p3d').T
# 载入对应
corr = genfromtxt('2D/nview-corners',dtype='int')
# 载入照相机矩阵到 Camera 对象列表中
P = [Camera(loadtxt('2D/00'+str(i+1)+'.P')) for i in range(3)]
# 将三维点转换成齐次坐标表示,并投影
X = vstack( (points3D,ones(points3D.shape[1])) )
x = P[0].project(X)
# 前两个视图中点的索引
ndx = (corr[:,0]>=0) & (corr[:,1]>=0)
# 获取坐标,并用齐次坐标表示
x1 = points2D[0][:,corr[ndx,0]]
x1 = vstack( (x1,ones(x1.shape[1])) )
x2 = points2D[1][:,corr[ndx,1]]
x2 = vstack( (x2,ones(x2.shape[1])) )
Xtrue = points3D[:,ndx]
Xtrue = vstack( (Xtrue,ones(Xtrue.shape[1])) )
# 检查前三个点
Xest = triangulate(x1,x2,P[0].P,P[1].P)
print(Xest[:,:3])
print(Xtrue[:,:3])
def compute_P(x,X):
n = x.shape[1]
if X.shape[1] != n:
raise ValueError("Number of points don't match.")
# 创建用于计算 DLT 解的矩阵
M = zeros((3*n,12+n))
for i in range(n):
M[3*i,0:4] = X[:,i]
M[3*i+1,4:8] = X[:,i]
M[3*i+2,8:12] = X[:,i]
M[3*i:3*i+3,i+12] = -x[:,i]
U,S,V = linalg.svd(M)
return V[-1,:12].reshape((3,4))
corr = corr[:,0] # 视图 1
ndx3D = where(corr>=0)[0] # 丢失的数值为 -1
ndx2D = corr[ndx3D]
# 选取可见点,并用齐次坐标表示
x = points2D[0][:,ndx2D] # 视图 1
x = vstack( (x,ones(x.shape[1])) )
X = points3D[:,ndx3D]
X = vstack( (X,ones(X.shape[1])) )
# 估计 P
Pest = Camera(compute_P(x,X))
# 比较!
print (Pest.P / Pest.P[2,3])
print (P[0].P / P[0].P[2,3])
# 投影
xest = Pest.project(X)
# 绘制图像
plt.figure()
plt.imshow(im1)
plt.plot(x[0],x[1],'bo')
plt.plot(xest[0],xest[1],'r.')
plt.axis('off')
plt.show()
真实点用圆圈表示,照相机矩阵投影点用圆表示,结果基本相同。
多视图重建
假设照相机已经标定,计算重建可以分为下面 4 个步骤:
(1) 检测特征点,然后在两幅图像间匹配;
(2) 由匹配计算基础矩阵;
(3) 由基础矩阵计算照相机矩阵;
(4) 三角剖分这些三维点。
已完成好4个步骤的代码,但当图像间的点对应包含不正确的匹配时,需要一个稳健的方法来计算基础矩阵。
稳健估计基础矩阵
三维重建的四种主要方式:
基于图像。应用广泛,精度比较低。
使用探针或激光读书器逐点获取数据,进行整体三角化,此类方法测量精确,但速度很慢,难以短时间内获得大量数据。
根据三维物体的断层扫面,得到二维图像轮廓,进行相邻轮廓的连接和三角化,得到物体表面形状。
光学三维扫描仪。应用硬件光学三维扫描仪获得物体的点云数据,进行重建获得物体的整体表面信息。
假设照相机已经标定,计算重建可以分为下面 4 个步骤:
- 检测特征点,然后在两幅图像间匹配;
- 由匹配计算基础矩阵;
- 由基础矩阵计算照相机矩阵;
- 三角剖分这些三维点。
编写代码:
from numpy import *
import scipy
from matplotlib import pyplot as plt
import cv2
# from skimage.measure import ransac
class Camera(object):
""" Class for representing pin-hole cameras. """
def __init__(self,P):
""" Initialize P = K[R|t] camera model. """
self.P = P
# 标定矩阵
self.K = None # calibration matrix
self.R = None # rotation
self.t = None # translation
# 照相机中心
self.c = None # camera center
def project(self,X):
""" Project points in X (4*n array) and normalize coordinates. """
#定义和坐标归一化
# (3,n)
x = dot(self.P,X)
for i in range(3):
x[i] /= x[2]
return x
def rotation_matrix(self,a):
""" Creates a 3D rotation matrix for rotation
around the axis of the vector a. """
# 旋转矩阵
R = eye(4)
R[:3,:3] = scipy.linalg.expm([[0,-a[2],a[1]],[a[2],0,-a[0]],[-a[1],a[0],0]])
return R
def factor(self):
""" Factorize the camera matrix into K,R,t as P = K[R|t]. """
# 分解前三列
K,R = scipy.linalg.rq(self.P[:,:3])
# 分解后三列
T = diag(sign(diag(K)))
if linalg.det(T) < 0:
T[1,1] *= -1
self.K = dot(K,T)
self.R = dot(T,R) # T is its own inverse
self.t = dot(linalg.inv(self.K),self.P[:,3])
return self.K, self.R, self.t
def my_calibration(sz):
"""
Calibration function for the camera (iPhone4) used in this example.
"""
row, col = sz
fx = 2555*col/2592
fy = 2586*row/1936
K = diag([fx, fy, 1])
K[0, 2] = 0.5*col
K[1, 2] = 0.5*row
return K
# 生成齐次坐标
def make_homog(points):
"""Convert points to homogeneous coordinates."""
return vstack((points,ones((1,points.shape[1]))))
def normalize(points):
""" Normalize a collection of points in
homogeneous coordinates so that last row = 1. """
for row in points:
row /= points[-1]
return points
def compute_fundamental(x1,x2):
""" 使用归一化的八点算法,从对应点(x1,x2 3×n 的数组)中计算基础矩阵
每行由如下构成:
[x'*x,x'*y' x', y'*x, y'*y, y', x, y, 1]"""
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
# 创建方程对应的矩阵
A = zeros((n,9))
for i in range(n):
A[i] = [x1[0,i]*x2[0,i], x1[0,i]*x2[1,i], x1[0,i]*x2[2,i],
x1[1,i]*x2[0,i], x1[1,i]*x2[1,i], x1[1,i]*x2[2,i],
x1[2,i]*x2[0,i], x1[2,i]*x2[1,i], x1[2,i]*x2[2,i] ]
# 计算线性最小二乘解
U,S,V = linalg.svd(A)
# V的最后一行有9个元素
F = V[-1].reshape(3,3)
# 受限 F
# 通过将最后一个奇异值置 0,使秩为 2
U,S,V = linalg.svd(F)
S[2] = 0
F = dot(U,dot(diag(S),V))
return F
def compute_epipole(F):
""" 从基础矩阵 F 中计算右极点(可以使用 F.T 获得左极点)"""
# 返回 F 的零空间(Fx=0)
U,S,V = linalg.svd(F)
e = V[-1]
# 归一化
return e/e[2]
def plot_epipolar_line(im,F,x,epipole=None,show_epipole=True):
""" 在图像中,绘制外极点和外极线 F×x=0。F 是基础矩阵,x 是另一幅图像中的点 """
m,n = im.shape[:2]
line = dot(F,x)
# 外极线参数和值
t = linspace(0,n,100)
lt = array([(line[2]+line[0]*tt)/(-line[1]) for tt in t])
# 仅仅处理位于图像内部的点和线
ndx = (lt>=0) & (lt<m)
plt.plot(t[ndx],lt[ndx],linewidth=2)
if show_epipole:
if epipole is None:
epipole = compute_epipole(F)
plt.plot(epipole[0]/epipole[2],epipole[1]/epipole[2],'r*')
def triangulate_point(x1,x2,P1,P2):
""" 使用最小二乘解,绘制点对的三角剖分 """
M = zeros((6,6))
M[:3,:4] = P1
M[3:,:4] = P2
M[:3,4] = -x1
M[3:,5] = -x2
U,S,V = linalg.svd(M)
X = V[-1,:4]
return X / X[3]
def triangulate(x1,x2,P1,P2):
""" x1 和 x2(3×n 的齐次坐标表示)中点的二视图三角剖分 """
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
X = [ triangulate_point(x1[:,i],x2[:,i],P1,P2) for i in range(n)]
return array(X).T
from PIL import Image
from numpy import *
from pylab import *
# 载入一些图像
im1 = array(Image.open('images/001.jpg'))
im2 = array(Image.open('images/002.jpg'))
# 载入每个视图的二维点到列表中
points2D = [loadtxt('2D/00'+str(i+1)+'.corners').T for i in range(3)]
# 载入三维点
points3D = loadtxt('3D/p3d').T
# 载入对应
corr = genfromtxt('2D/nview-corners',dtype='int')
# 载入照相机矩阵到 Camera 对象列表中
P = [Camera(loadtxt('2D/00'+str(i+1)+'.P')) for i in range(3)]
# 将三维点转换成齐次坐标表示,并投影
X = vstack( (points3D,ones(points3D.shape[1])) )
x = P[0].project(X)
# 前两个视图中点的索引
ndx = (corr[:,0]>=0) & (corr[:,1]>=0)
# 获取坐标,并用齐次坐标表示
x1 = points2D[0][:,corr[ndx,0]]
x1 = vstack( (x1,ones(x1.shape[1])) )
x2 = points2D[1][:,corr[ndx,1]]
x2 = vstack( (x2,ones(x2.shape[1])) )
Xtrue = points3D[:,ndx]
Xtrue = vstack( (Xtrue,ones(Xtrue.shape[1])) )
# 检查前三个点
Xest = triangulate(x1,x2,P[0].P,P[1].P)
print(Xest[:,:3])
print(Xtrue[:,:3])
def compute_P(x,X):
n = x.shape[1]
if X.shape[1] != n:
raise ValueError("Number of points don't match.")
# 创建用于计算 DLT 解的矩阵
M = zeros((3*n,12+n))
for i in range(n):
M[3*i,0:4] = X[:,i]
M[3*i+1,4:8] = X[:,i]
M[3*i+2,8:12] = X[:,i]
M[3*i:3*i+3,i+12] = -x[:,i]
U,S,V = linalg.svd(M)
return V[-1,:12].reshape((3,4))
# 从点对中计算 P
class RansacModel(object):
def __init__(self,debug = False):
self.debug = debug
def fit(self,data):
data=data.T
# 数据分成两个点集,x1分为前三行,x2分为三行之后
x1 = data[:3,:8]
x2 = data[3:,:8]
F = compute_fundamental_normalized(x1,x2)
return F
def get_error(self,data,F):
data = data.T
x1 = data[:3]
x2 = data[3:]
# 将 Sampson 距离用作误差度量
Fx1 = dot(F,x1)
Fx2 = dot(F,x2)
denom = Fx1[0]**2 + Fx1[1]**2 + Fx2[0]**2 + Fx2[1]**2
err = ( diag(dot(x1.T,dot(F,x2))) )**2 / denom
# 返回每个点的误差
return err
# 归一化的八点算法
def compute_fundamental_normalized(x1,x2):
n = x1.shape[1]
if x2.shape[1] != n:
raise ValueError("Number of points don't match.")
# 归一化图像坐标
x1 = x1 / x1[2]
mean_1 = mean(x1[:2],axis=1)
S1 = sqrt(2) / std(x1[:2])
T1 = array([[S1,0,-S1*mean_1[0]],[0,S1,-S1*mean_1[1]],[0,0,1]])
x1 = dot(T1,x1)
x2 = x2 / x2[2]
mean_2 = mean(x2[:2],axis=1)
S2 = sqrt(2) / std(x2[:2])
T2 = array([[S2,0,-S2*mean_2[0]],[0,S2,-S2*mean_2[1]],[0,0,1]])
x2 = dot(T2,x2)
# 使用归一化的坐标计算F
F = compute_fundamental(x1,x2)
# 反归一化
F = dot(T1.T,dot(F,T2))
# F[2,2]是最后一个坐标
return F/F[2,2]
# 从点对中计算基础矩阵
def F_from_ransac(x1,x2,model,maxiter=5000,match_theshold=1e-6):
import ransac
data = vstack((x1,x2))
# 计算 F 和内点
F,ransac_data = ransac.ransac(data.T,model,8,maxiter,match_theshold,20,return_all=True)
return F, ransac_data['inliers']
def compute_P_from_essential(E):
""" 从本质矩阵计算四个可能的 P 矩阵 """
# 本质矩阵有两个奇异值,一个为 0,另一个相等
U,S,V = linalg.svd(E)
# 两个可能的解
W = array([[0,-1,0],[1,0,0],[0,0,1]])
# 两个可能的 P 矩阵
P2 = [vstack((dot(U,dot(W,V)).T,U[:,2])).T,
vstack((dot(U,dot(W,V)).T,-U[:,2])).T]
return P2
# 标定矩阵
K = array([[2394,0,932],[0,2398,628],[0,0,1]])
# 载入图像,并计算特征
im1 = array(Image.open('images/001.jpg').convert('L'))
l1,d1 = cv2.SIFT_create().detectAndCompute(im1,None)
im2 = array(Image.open('images/002.jpg').convert('L'))
l2,d2 = cv2.SIFT_create().detectAndCompute(im2,None)
# 匹配特征,并计算齐次坐标
matches = cv2.BFMatcher().knnMatch(d1,d2,k=2)
ndx = matches[0]
# 去除错误匹配
matches = [m for m,n in matches if m.distance < 0.7*n.distance]
ndx = matches
# 归一化坐标
x1 = make_homog(array([l1[m.queryIdx].pt for m in matches]).T)
ndx2 = [m.trainIdx for m in matches]
x2 = make_homog(array([l2[m.trainIdx].pt for m in matches]).T)
x1n = dot(inv(K),x1)
x2n = dot(inv(K),x2)
model = RansacModel()
E,inliers = F_from_ransac(x1n,x2n,model,maxiter=1000)
P1 = array([[1,0,0,0],[0,1,0,0],[0,0,1,0]])
# 4 个可能的解
P2 = compute_P_from_essential(E)
# 选取点在照相机前的解
ind = 0
maxres = 0
for i in range(4):
# 三角剖分正确点,并计算每个照相机的深度
X = triangulate(x1n[:,inliers],x2n[:,inliers],P1,P2[i])
d1 = dot(P1,X)[2]
d2 = dot(P2[i],X)[2]
if sum(d1>0)+sum(d2>0) > maxres:
maxres = sum(d1>0)+sum(d2>0)
ind = i
infront = (d1>0) & (d2>0)
# 三角剖分正确点,并移除不在所有照相机前面的点
X = triangulate(x1n[:,inliers],x2n[:,inliers],P1,P2[ind])
X = X[:,infront]
# 绘制三维图像
from mpl_toolkits.mplot3d import axes3d
fig = figure()
ax = fig.add_subplot(projection='3d')
ax.plot(-X[0], X[1], X[2], 'k.')
axis('off')
# 绘制 X 的投影 import camera
# 绘制三维点
cam1 = Camera(P1)
cam2 = Camera(P2[ind])
x1p = cam1.project(X)
x2p = cam2.project(X)
# 反 K 归一化
x1p = dot(K, x1p)
x2p = dot(K, x2p)
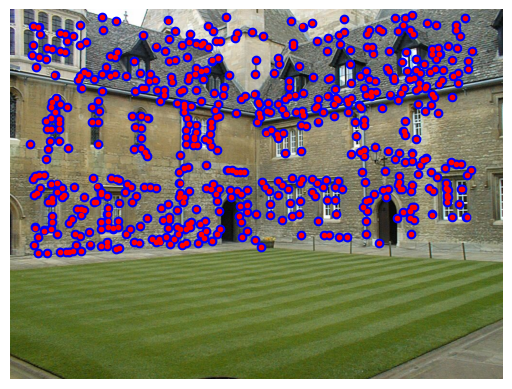
plt.figure()
plt.imshow(im1)
plt.gray()
plt.plot(x1p[0], x1p[1], 'o')
plt.plot(x1[0], x1[1], 'r.')
plt.axis('off')
plt.figure()
plt.imshow(im2)
plt.gray()
plt.plot(x2p[0], x2p[1], 'o')
plt.plot(x2[0], x2[1], 'r.')
plt.axis('off')
plt.show()
文中提到的链接已经不能用了,新链接参见:https://scipy-cookbook.readthedocs.io/_downloads/d7a553f634786b4ad9b366d80a229e5f/ransac.py
另外,有些代码也已经过时了,需要修改后才能使用。
运行结果: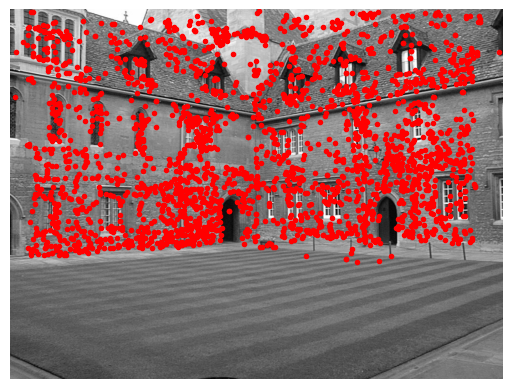
可以看到,二次投影后的点和原始特征位置不完全匹配, 但是已经非常好了。
小结
这一章对我来说看得很吃力,有些概念到现在还是不能完全理解。暂且记录下来。

一站式 AI 云服务平台
更多推荐



 1
1 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)