
【学习笔记】倾斜摄影、高斯泼溅(3DGS)、点云与数字孪生“族谱”全盘点
本文围绕变电站数字孪生建设中的三维建模技术展开,系统分析了倾斜摄影、3D高斯泼溅(3DGS)和点云三种主流技术的特点与应用场景。倾斜摄影通过多角度航拍生成实景三维模型,适用于大范围地理信息构建;3DGS采用高斯椭球点云渲染技术,擅长高真实感动态展示;点云则提供精确的空间几何骨架。文章详细比较了PLY、LCC等模型格式的优劣,并介绍了国产CIMPro孪大师平台如何整合多源数据,实现零代码数字孪生开发
从变电站巡检的可视化运维需求出发,很多团队发现,传统二维图纸已经难以支撑现场设备的动态监控与状态推演。于是,数字孪生技术开始成为升级“智慧场站”的核心抓手。
一个可交互的变电站数字孪生体,首先需要三维空间数据支撑。
除了手动的精细建模(比如3ds Max、BIM),业内更关注几种自动化的建模路径:倾斜摄影、点云,以及最近火起来的高斯泼溅(3DGS)。
这篇文章将一次性把这几位“建模主力”的定位和关系说清楚。
一、大白话讲明白三个关系
1.1 倾斜摄影:三维重建实景
只用无人机拍正俯视视角,就好比只盯着一个人的发旋看——只能看到头顶心永远看不清他穿了什么衣服。
而采用倾斜摄影,天上的无人机会同时架设五个不同的相机镜头:一个镜头垂直向下拍“顶视图”,另外四个镜头分别朝着前后左右四个方向倾斜30°到60°拍摄。
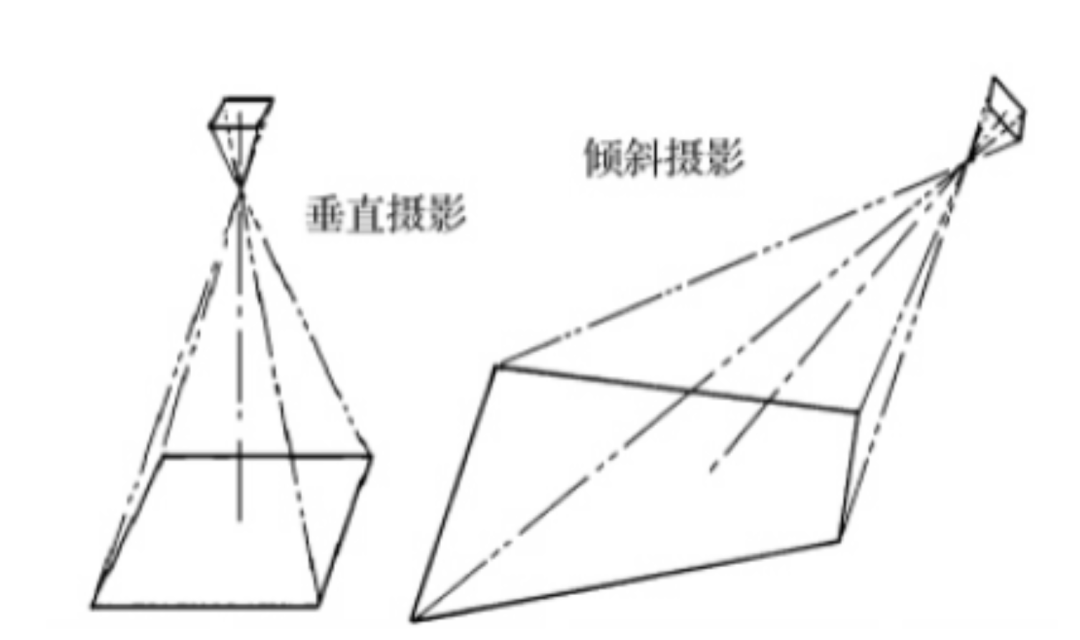
拍回的照片经建模软件解析后(如ContextCapture、Pix4D等),自动匹配同名特征点,通过空间交会解算出三维坐标,最终融合生成完整的实景三维模型。
倾斜摄影的核心价值在于:依托海量多角度、高重叠影像,经由专业实景三维建模软件解算(如 ContextCapture/Bentley、Pix4D、PhotoScan/Metashape、Smart3D 等),借助计算机视觉技术(特别是运动恢复结构和多视图立体匹配算法)生成真实三维模型。
倾斜摄影三维模型生成通常分为以下几个严谨步骤:
1、航线与角度设计
使用五镜头(或更多视角)相机,从垂直、前、后、左、右五个方向对目标区域进行高重叠率拍摄,确保每个地物点至少被3个以上不同视角的影像覆盖。
2、特征提取与匹配
软件自动检测每张影像中的显著特征点(如角点、边缘),并跨影像匹配同名点,建立影像间的几何对应关系。
3、空中三角测量解算
基于同名点和相机内参、GPS/IMU外方位元素,进行光束法平差,解算出每一张影像精确的空间位置与姿态,同时加密匹配出稀疏点云。
4、生成密集点云
在空三结果基础上,通过多视立体匹配算法逐像素计算视差,生成高密度的三维点云,描述物体表面几何形态。
5、构建不规则三角网(TIN)
将密集点云三角剖分成连续的不规则三角网,形成模型的基本骨架(白模)。
6、纹理自动映射
从原始倾斜影像中选取最佳视角的纹理,反投影到三角网表面,输出带真实纹理的LOD(细节层次)三维模型。
1.2 3D高斯泼溅(3DGS)
用“彩色小球”拼出来的油画世界
3D高斯泼溅是一种较新的三维重建技术,简单来说,它不再使用三角形面片来搭建物体形状,而是在虚拟空间中“泼溅”数百万个三维高斯椭球(每个都像一个小小的彩色水珠,半透明、会发光)。
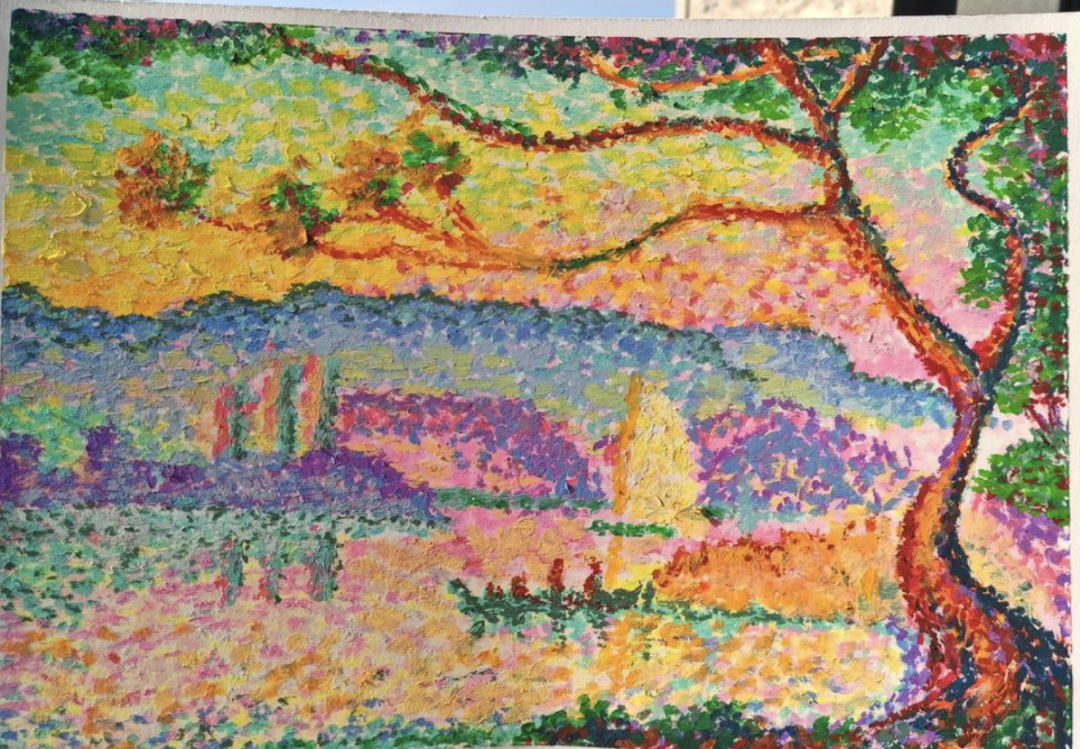
3DGS在空间里撒了无数个高斯球,类似油画点彩
每个高斯单元不仅记录了空间坐标、尺寸与透明度,还携带了球谐系数,使其能随视角变化实时调整颜色——就像从正面看是正红,转到侧面便泛出玫红光晕,细腻模拟真实材质的光泽变化。
3DGS三维模型生成的基本过程如下:
1. 多点位图像采集
使用3DGS采集设备(如其域灵光L2)从不同角度采集目标场景的多幅图像,保证完整覆盖各个视角。
2. 初始稀疏点云生成
利用运动恢复结构(Structure from Motion,SfM)算法(如COLMAP),从多幅图像的匹配特征点中求解相机位姿并产出稀疏点云。
3. 高斯椭球初始化
将稀疏点云中的每个点初始化为一个三维高斯椭球,每个高斯基元都可进行学习与优化。
4. 可微分瓦片光栅化渲染
将三维高斯椭球投影(即“泼溅”)到二维屏幕上形成椭圆半透明斑点,按深度排序后进行α混合以合成像素颜色,整个过程是可微分的。
5. 端到端优化
以梯度下降法迭代计算渲染图像与输入真实图像的损失,反向传播优化每个高斯的中心位置、协方差(控制椭球形状与朝向)、不透明度及颜色(由球谐系数编码)等参数。
6. 自适应密度控制
根据位置梯度等指标对高斯椭球进行动态分裂(在高梯度区域拆分)、克隆(复制补充)和修剪(剔除透明度过低或比例过大的高斯),以平衡几何细节表达与模型紧凑性。
1.3 点云:离散三维点的几何坐标集合
点云由海量离散点构成,每个点携带精确的X、Y、Z坐标,部分还包含颜色或反射强度信息。它通常通过激光雷达(LiDAR)或多视立体匹配生成,能快速捕捉物体表面的三维几何形态。
点云本身没有面片与纹理,但作为基础数据源,可进一步生成网格模型、数字高程模型或与倾斜摄影、高斯泼溅融合,为变电站等场景提供精准空间骨架。
点云模型生成的基本过程如下:
1. 数据采集
使用三维激光扫描仪(LiDAR)、结构光扫描仪或多视角立体视觉等方法获取物体表面的离散点集,每个点包含精确的三维坐标(X、Y、Z),部分设备还可附加颜色和反射强度信息。
2. 数据预处理
对原始点云进行系统化质量提升:去噪滤波去除噪声与离群点(如统计滤波、半径滤波),体素下采样降低冗余数据量(可压缩90%以上),同时剔除扫描中产生的误差点与离群点。
3. 多视拼合(配准)
由于单次扫描存在测量死区,需要多次测量后对多视角点云进行坐标对齐。先采用手动注册进行快速对齐定位,再通过全局注册(如ICP算法结合FPFH特征描述子)消除局部误差,最终拼合为完整的点云模型。
4. 三角网格化(曲面模型构建)
对配准后的完整点云进行构网(也称为曲面重建),将离散点集转化为连续的三角网格模型。主流方法有泊松重建和三角网格化两类:前者输出隐式曲面,适用于文物数字化等场景;后者输出显式网格,常用于工业设计。构网后模型由离散点转变为由面片构成的网格模型。
5. 纹理映射(着色)
若扫描阶段启用了彩色扫描,可对网格模型进行贴图:将采集时获得的RGB色彩信息映射到模型表面,使三维模型颜色更加真实。
6. 模型导出与应用
最终模型可导出为PLY、OBJ、STL等通用标准格式,用于渲染展示、三维测量或3D打印。
二、三种技术的关系,如何应用于数字孪生开发
这三种技术并不是“上位替代”或者“一家独大” ,它们更多是并行的、各有侧重的伙伴:
倾斜摄影:从空中高效捕获大范围实景,覆盖域广、采集速度快,适用于城市级底图构建及地理信息平台。
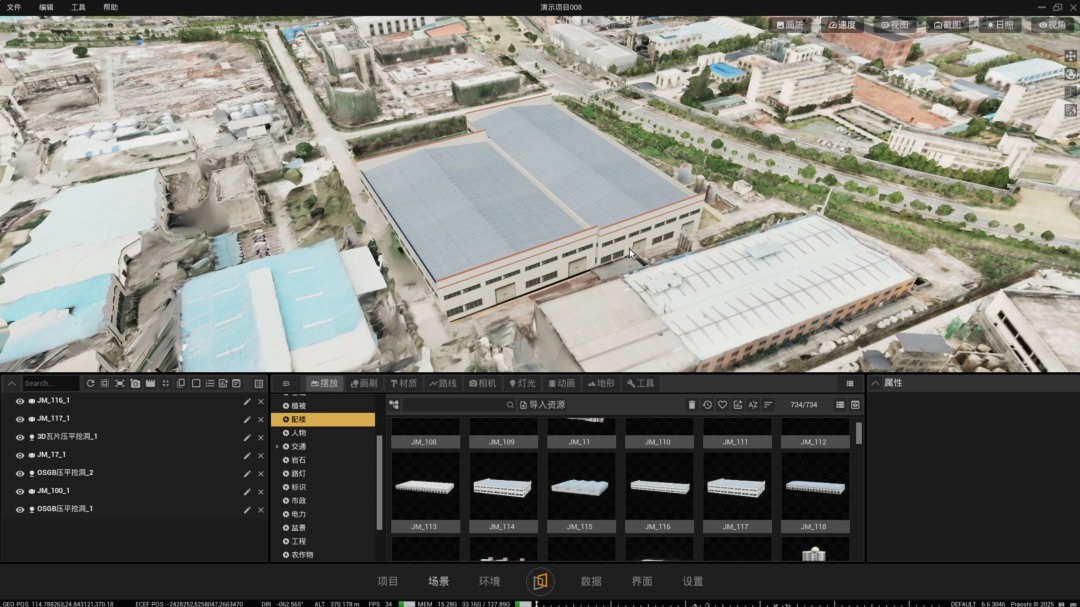
图1 基于CIMPro孪大师导入的倾斜摄影模型
点云:作为最基础的空间几何数据源,为后续建模提供离散点“骨架”;无论是3DGS还是网格重建,均需依靠点云定型,继而附加属性与纹理。
3DGS:渲染真实感突出,尤其擅长还原半透明材质、枝叶、反光玻璃等高精细节,同时维持60fps以上实时帧率,适合VR/AR预览及数字营销等交互场景。
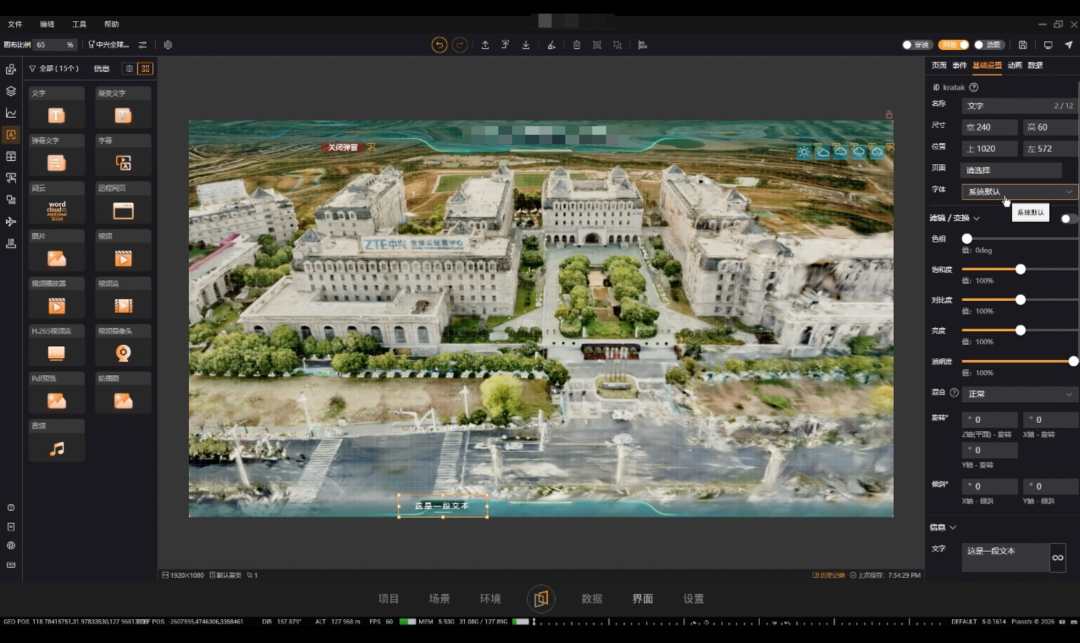
图2 CIMPro孪大师导入其域PLY模型示意
无论是城市级孪生还是工厂级孪生,倾斜摄影、点云和3DGS产生的模型格式(如OSGB、PLY、LCC等)都已成为不可或缺的底层数据来源——它们让数字孪生更接近真实。
三、倾斜摄影、高斯泼溅(3DGS)、点云都有哪些文件格式
3.1 PLY格式:最常见的“万能存盘格式 ”
PLY(Polygon File Format)作为一种在三维扫描和学术领域被广泛使用的网格文件格式,在数据交换和处理中各有利弊。
✅ 优点:
-
结构明晰,易于拓展:通过自带的ASCII文件头,直接定义了文件中的数据结构和属性,方便开发和调试。同时支持用户自定义元素属性(如顶点颜色、法线、点云强度等),具有很强的可拓展性。
-
顶级的视觉属性存储:与市面上大量“颜色盲”的3D格式(如STL)不同,PLY格式原生支持存储顶点颜色(Vertex Colors) 。这种保留色彩的能力能直观反应扫描物体的真实观感,在需要材质和纹理判断的场景下尤为适用。
-
支持海量点云与高斯泼溅(3DGS) :PLY不仅支持存储多边形网格,还原生支持海量点云数据。在3DGS技术中,标准的PLY文件能存储每个高斯点云的颜色、位置、透明度以及复杂的球谐函数(SH系数)参数,非常适合处理实时渲染的复杂三维模型。
-
出色的兼容性:作为一种开放通用的标准,PLY格式受到如MeshLab、Blender以及PCL、Open3D等专业库的广泛支持,便于不同平台间进行数据分享和处理。
❌ 缺点:
-
文件体积臃肿:为了追求视觉属性上的丰富性,PLY格式往往需要牺牲存储效率。对于复杂的扫描模型,其产生的文件体积极为庞大,这对于数据传输和磁盘存储都是一种考验。
-
不支持动态效果:PLY格式专注于静态模型的几何与颜色数据,完全不支持动画、骨骼绑定、形变动画等高级特性。如果你的场景需要运动或复杂的材质光照,PLY格式显然不是最佳选择。
-
纹理支持简陋:虽然支持顶点颜色,但PLY不直接支持外链的高清纹理贴图(UV贴图)。在不允许逐顶点储存颜色的压缩场景下,模型展示效果会打折扣。
-
缺乏标准化:PLY没有脱离学术工具范畴成为一个正式的国际标准,导致不同扫描仪或软件在处理二进制(Binary)与文本(ASCII)编码时存在潜在的解析一致性挑战。
3.2 LCC格式
为大场景而生的“高压缩格式”
Lixel CyberColor(其域创新自研 3DGS 专用格式)
LCC 是其域创新为 3D 高斯泼溅(3DGS)设计的专有二进制格式,用于高效存储、分发与渲染大规模 3D 高斯场景;配套 Lixel 扫描仪与 LCC Studio 生成工具,支持输出.lcc 与通用.ply 双格式。

✅ 优点:
1、极致压缩:文件体积比标准 PLY小 80% 以上,LCC2 可达 PLY 的 8%,节省存储与带宽。
2、原生 LOD 流式加载:支持城市级 / 园区级大场景分块与层级渲染,移动端秒级加载数亿高斯点。
3、跨平台兼容:适配 PC / 移动端 / AR 眼镜,支持 Unity/UE/CIMPro/WebGL 二次开发。
4、工程级空间属性:绑定激光雷达 + SLAM 数据,含精确尺度、坐标系统与结构信息,支持测量与碰撞模拟。
❌缺点:
1、专有封闭格式:非开源,仅其域生态(扫描仪 / 软件 / 插件)原生支持,第三方工具需转换。
2、无原生网格转换:暂不支持直接转 OBJ/GLB/FBX 等传统网格格式。
3、依赖专用硬件:生成需 Lixel 系列扫描仪,暂不支持第三方采集设备。
3.3 点云模型格式
📋通用标准点云格式
-
PLY最常用,3DGS 高斯泼溅、普通点云、三角网格通用,支持顶点 / 颜色 / 法线 / 自定义属性,分 ASCII 和二进制。
-
PCDPCL 点云库标准格式,科研、算法开发最常用,专为点云设计,结构清晰、便于程序读写。
-
LAS / LAZ测绘激光雷达专用,行业主流;LAS 无压缩,LAZ 是 LAS 压缩版,带 GPS 坐标、高程、回波强度,国土 / 电力 / 测绘必用。
-
XYZ / TXT / CSV纯文本最简格式,只存 X Y Z(+RGB),可用记事本打开,兼容性无敌,但无结构、体积大。
🏭专业工程 / 软件专属格式
-
LCC你正在看的其域创新自研,3D 高斯泼溅专用,压缩率高、带 LOD 流式、封闭专有格式。
-
E57工业扫描通用交换格式,可存点云 + 影像 + 扫描位姿,全站仪、三维扫描仪通用,跨品牌互传首选。
-
PTS徕卡、法如等三维激光扫描仪原生导出格式,纯点云文本,常用于后期建模导入。
-
OBJ本来是网格格式,也可只存顶点当裸点云用,通用建模软件都能打开。
🪐三维平台 / 游戏引擎格式
-
GLB / GLTFWeb / 引擎通用,可封装点云、网格、材质,适合网页展示、Unity/UE 加载。
-
FBX老牌通用格式,可携带点云、骨骼、动画,建模、游戏、BIM 通用。
🛰️GIS/BIM 地理信息类
-
SHP(Shapefile)GIS 矢量点云,带地理属性,ArcGIS、CAD 常用。
-
3D TilesCesium 三维 GIS 专用,海量点云 / 模型流式加载,城市数字孪生标配。
3.4 如何生成PLY和LCC数据
PLY是怎么生成的
-
采集原始数据(通过激光雷达扫描、倾斜摄影群拍或手持SLAM扫描仪等),获得稠密的点云(杂乱的星空散点)。
-
在计算机中用运动恢复结构、多视立体视觉等算法对照片进行空间三角定位,构造初始点云。
-
用专业建模手段将点云构造成网格或高斯球模型。
-
最后通过建模软件导出为PLY文件(在MeshLab中选择“Export Mesh as PLY”保存即可)。
LCC是怎么生成的
LCC = Multi-SLAM 激光视觉融合 + 自研优化 3D 高斯泼溅(3DGS)+ 专利结构化压缩 + 层级 LOD 分块
五步标准生成流程
高撕泼溅/3DGS
1. 实景空间采集(硬件端)
-
专用设备:灵光 Lixel 系列手持激光全景扫描仪(仅支持原厂硬件,不兼容第三方相机 / 雷达)
-
同步采集:LiDAR 激光测距 + 6K 全景视觉影像 + 位姿 IMU
-
Multi-SLAM 实时解算:全程定位轨迹、尺度校准、室内外空地场景无缝拼接
-
AI 预处理:自动剔除行人、车辆等动态干扰物体,保留静态实景结构
2. 原始数据导入(本地 PC)
-
扫描原始数据包导出,接入LCC Studio 官方桌面软件XGRIDS其域创新
-
自动读取激光点云、视频帧、位姿轨迹、空间坐标全套原始数据
3. 高斯重建运算(核心生成)
-
多帧影像 + 激光深度联合对齐,统一世界坐标系
-
自研优化 3DGS 算法,拟合海量3D 高斯椭球参数(位置、旋转、尺度、颜色、透明度)
-
空地融合、多段场景自动拼接,生成城市 / 园区级超大完整高斯场景
-
输出标准 PLY 通用高斯模型作为中间基底
4. LCC 专有格式编码
-
高斯结构化轻量化重构、拓扑分块规整
-
专利无损 + 结构化双重压缩:体积仅原版 PLY 8%~20%
-
批量生成层级 LOD 多细节层级,原生支持流式加载
-
绑定空间尺度、地理坐标、碰撞物理属性,生成最终 .lcc专有文件
5. 模型编辑 & 多端发布
-
LCC Studio 内调色、裁剪、去噪、语义标注、户型生成
-
一键分发:PC / 移动端 / AR/Unity/UE/WebGL 云端流式渲染
✅一句话总结
用Lixel 激光 SLAM 扫描实景 → LCC Studio 跑自研 3DGS 高斯重建 → 专利压缩 + LOD 分块结构化编码 → 输出高精度、超小体积、可无限大场景流式加载的LCC 高斯格式。
四、倾斜摄影、高斯泼溅(3DGS)、点云是数字孪生世界的连接器
当前,不少企业的三维模型仍停留在可视化展示层面,主要用于资产归档或演示素材,尚未真正嵌入设备巡检、故障预警、远程运维等生产闭环。模型作为运维核心资产的价值,远未得到有效释放。
数字孪生,即通过高精度三维数据、传感器实时数据和AI运算,在虚拟世界中构建一个与现实世界高度同步的数字双胞胎。
在数字孪生实施过程中,用户往往需要融合多源异构三维数据,构建可统一呈现的可视化方案。这就需要一款能兼容主流格式、支持快速集成与发布的开发工具。
国产CIMPro孪大师作为轻量级数字孪生引擎,同时兼顾初级与专业开发者,恰好满足此类需求。
CIMPro孪大师是一款拥有完全自主知识产权的国产一站式零代码数字孪生三维可视化引擎,全面支持国产信创。能源电力、智能制造、基础设施、军事仿真、船舶海洋等领域的IT开发人员与3D美术开发者均可通过该平台高效开展数字孪生三维可视化大屏项目的开发。
它支持30多种三维模型格式的直通导入(包括Revit、SolidWorks、CATIA、OSGB、BIM、倾斜摄影、点云、PLY、LCC等),集高精度三维渲染、实时数据对接、零代码交互开发于一体,以“全套融合、所见即所得”为设计理念。
图3 CIMPro孪大师导入高斯泼溅模型后的编辑态
用户将扫描得到的点云、高原生LCC文件或传统数字城市倾斜摄影模型导入CIMPro孪大师后,再轻松接入物联数据(传感器、GPS、wms等),零代码开发交互,就能高效交付各行业的数字孪生应用,大幅降低企业自主构建数字孪生的技术门槛。
参考文献:

一站式 AI 云服务平台
更多推荐
 2
2 0
0- 0



 已为社区贡献1条内容
已为社区贡献1条内容

所有评论(0)